众所周知,中国民航现阶段在终端区内已几乎全部采用RNAV进离场,在VATPRC的新手快速入门指南里,RNAV离场程序也成了PDC的默认程序,在最后指出:
那么,什么情况下我们可以执行RNAV进离场程序呢?如果在连飞中飞一架带有GNS430等GPS的小型通航飞机,我们是否可以执行这个程序,下面将从记载导航设备和运行要求中一一道来。
首先RNAV区域导航已经不是一个陌生的名称了,对比传统导航模式的优点相比大部分人都已经听说,那么我们回到传统导航方式上,我们有
- 目视飞行
- 借助地基设备的导航方式,包括:VOR,NDB,DME,ILS
- 雷达引导
而RNAV区域导航,我们只需要:
- GNSS(全球导航卫星系统,包括美国的GPS,欧洲的伽利略,俄罗斯的Glonass和未来的北斗导航系统,统称为GNSS)
- DME/DME (双DME来确定航空器位置)
- DME/DME 与 IRU(双DME和航空器上的惯性基准组件)
所以理论上讲,大家连飞时主流用到的飞机都可以执行RNAV区域导航。FAA有一个专门的咨询通告,详细列出各个飞机制造商和航电制造商的产品是否满足RNAV能力
但是所有RNAV进离场的航图上都有一个标记: RNAV1
以首都机场为例
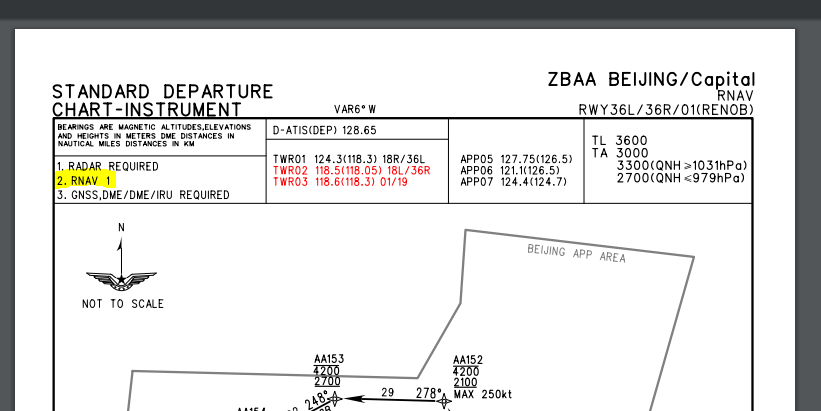
什么是RNAV1?
RNAV1 指在95%的飞行时间内, 总系统误差 不得超过1nm,相应的,RNAV2 指在95%的飞行时间内, 总系统误差 不得超过2nm。
总系统误差包含: 航迹定义误差(path definition error) , 飞行技术误差(flight technic error) 和 位置估计误差(position estimation error) 的适量合

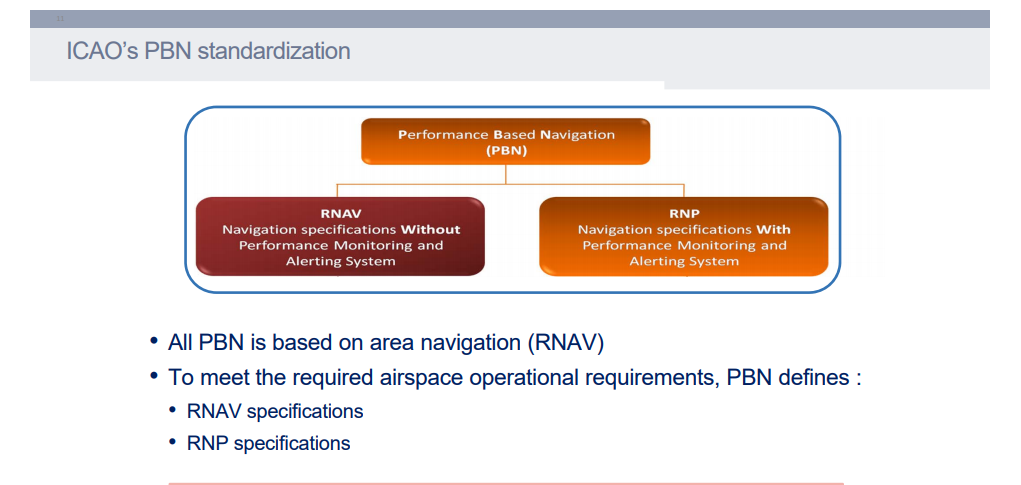
那么,我们如何在机载设备上看到因为这些系统误差而影响的导航性能呢,在引入机载设备告警能力(On board Performance Monitoring and Alerting, OPMA)后,有一个新的名词, 所需导航性能(Required Navigation Performance),即RNP
所以, RNAV+OPMA机载设备告警能力=RNP ,那么RNAV,RNP,和PBN的关系如下
回到我们之前的话题里,RNAV1。既然大部分机载设备都具有RNAV进离场能力,我们是不是可以满足RNAV1要求呢?
记住, RNAV进离场能力 不等于 RNAV1
FAA AC-90-100A 和 CAAC咨询通告“在航路和终端区实施RNAV1和RNAV2的运行指南” 都对实际运行有详细规定,民航局的咨询通告基本是翻译自FAA,因此我们把几个重要要求列出来。
- 对于使用GPS作为RNAV主要导航源的,GPS必须满足TSO-129,TSO145/146的要求,简单来说模拟飞行里常见的Garmin GNS430/GNS530/GTN750 都可以,但是FSX默认飞机的手持GPS不满足这个要求
- GPS/FMS 数据库必须保持当前最新的
- 不具有WAAS能力的GPS(只满足TSO-129要求的GPS)需在起飞前进行RAIM预测(模拟飞行不受影响)
- RNAV 进离场程序必须从机载导航数据库中调取, 不得人工造点
- RNAV1下运行必须 使用水平偏差指示器,水平导航模式 下的飞行指引和( 或)自动驾驶
- RNAV2下运行必须 使用水平偏差指示器,建议使用飞行指引和(或)自动驾驶
- RNAV1离场时,不得晚于机场标高已上500英尺接通RNAV设备和水平指引,在模拟飞行里,即不得晚于500英尺接通LNAV模式
回到最初的问题,小飞机是否具有RNAV进离场能力,那么只要符合以上要求,即符合仪表飞行规定的GPS,更新的导航数据,机载飞行指引/自动驾驶,不晚于500英尺接通飞行指引,我们可以放心地飞RNAV进离场
有关RNAV GNSS,RNP APCH, RNP AR 的相关知识,如果各位感兴趣会继续补充,有任何问题请回复提出
几个重要附件:
9444
小型航空器实施非传统仪表飞行的运行要求.pdf
" data-fileid="9444
9445
在航路和终端区实施RNAV1和RNAV2的运行指南.pdf
" data-fileid="9445
未完待续