标准仪表离场图
离场程序的目的是使航空器起飞后从机场过渡到航路飞行。离场程序以标准仪表离场图(SID)的形式公布在航图手册中,飞行员按照离场图中公布离场程序飞行不仅可以满足超障要求,同时可以简化ATC指令,避免通信拥挤。
如下图,离场图的标题中从左至右依次包含航图名称、磁差信息、通信频率列表、机场所在地名称、机场名称及适用的跑道号。
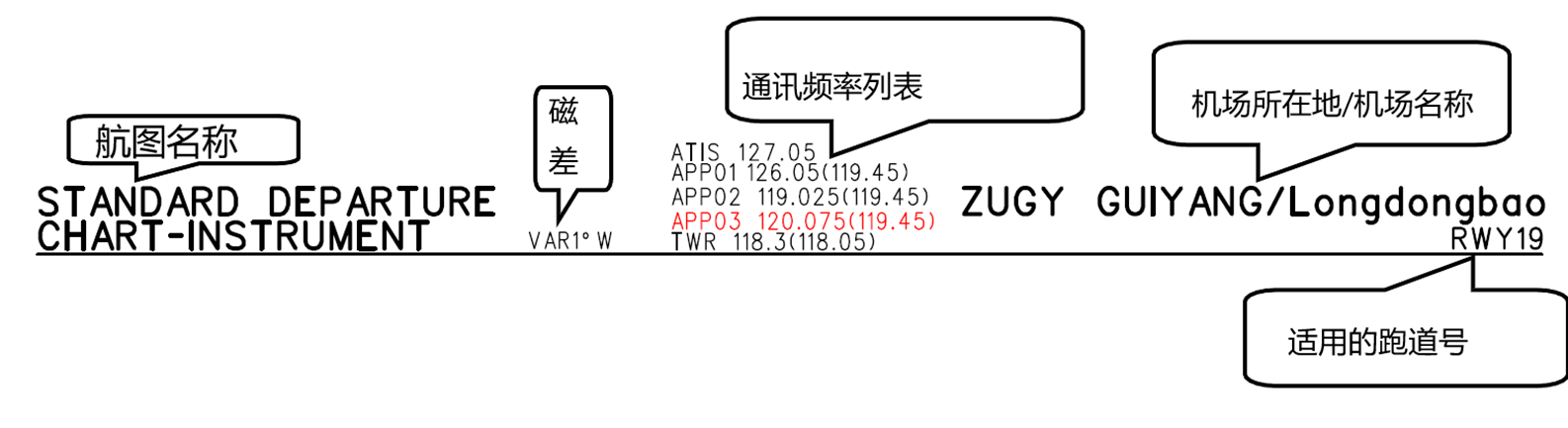
我们在之前的航图中都能查阅到通信频率这一信息,而在离场图的通信频率列表中,一般会给出飞行员在离场过程中用到的通信频率。在不同机场的离场图中给出的通信频率可能会不同,一般会包括自动终端情报服务(ATIS)的频率、塔台(TWR)的频率和进近(APP)的频率。如果通信频率存在主用频率和备用频率,会把备用频率放在括号中进行标注。另外,有些机场根据不同的管制范围进一步划分了管制扇区。在地面上,塔台可以按跑道分为不同的扇区;在进近,进近管制室会根据流量需求划分为不同的扇区。如果存在扇区划分,会分别列出每一个扇区的频率。当有些通信频率开放时间有时效性时,会在括号中给出时间限制。
如下图所示:
- 贵阳龙洞堡机场ATIS的频率为
127.05MHz,塔台的主用频率为118.30MHz,备用频率为118.0MHz; - 贵阳进近分为3个扇区,其中APP01表示一号扇区,其主用频率为
126.05MHz,备用频率为119.45MHz,APP02表示二号扇区,其主用频率为119.025MHz,备用频率为119.45MHz。

标准仪表离场图的覆盖范围要求能清楚地表示起飞跑道至加入航路的那一点。由于不同机场离场航线的分布情况、机场和有关导航台的地理位置不同,因而制图单位会根据不同机场的具体情况进行制图,所以比例尺的选用会不同。但是离场图一般不按比例尺绘制,如果不按比例尺绘制,会在图中注明“不按比例”。
基本概念
离场图的平面图中主要给出每条离场程序名称、飞行航迹、高度、爬升梯度等信息,同时还给出了有关的速度限制、空域限制等限制条件。本节将从离场程序的命名、机场、导航台、定位点、飞行航迹、限制条件等方面进行介绍。
-
离场程序命名: 离场程序开始于起飞跑道的离地端(DER,即公布适用于起飞区域的末端(跑道端或净空道端(如果跑道设有净空道)),终止于加入航路的一个重要点或导航台。离场程序的命名有两种方式。通常以离场程序结束的航路点或导航台的识别标志加上数字编号及英文字母“D”来表示。
- 例如:
- 厦门05号NUSPA方向的一个离场程序
NUSPA-91D(由于编码规范,一般简写作NUS-91D)。其中,NUSPA表示该离场程序的终止点,在这个点之后航空器就进入航路飞行,“D”表示Departure,即这是一条离场程序,数字91表示这是终止与NUSPA报告点的第一条离场程序。数字的编号一般由程序设计者决定。 - 在一些较小的机场,因离场程序较少,采用以英文字母“D”加数字编号的形式作为离场程序的名称。如D-01、D-02。
- 厦门05号NUSPA方向的一个离场程序
- 例如:
-
机场:在离场图中,起飞机场以跑道轮廓表示。而在最新改版的航图上,起飞机场以圆形阴影包住一个跑道的样式表示(参看下图的对比)。跑道轮廓不按比例尺绘制,但跑道轮廓可以显示跑道方向。如下图所示。如果离场图的图幅范围内存在影响图中离场航线的机场,该机场也会在离场图中标出。
- 导航台:离场程序由一系列的导航台、区域导航点亦或是航路点完成航迹引导。因此离场图中会绘制程序中用到的导航设施,并给出相应的导航设施识别信息。导航设施识别信息通常位于它所代表的导航设施符号附近。导航设施识别信息一般包含导航设施的名称、频率、识别标志及其相应的莫尔斯电码,若是测距仪(Distance Measuring Equipment,DME),一般会给出DME的波道信息。
- 甚高频全向信标台:甚高频全向信标台(VHF Omnidirectional Radio Range,VOR)是一种近程无线电导航台,它与机载甚高频全向信标接收机配合使用。
- VOR信号发射机和接收机的工作频率是在108.0~117.8 MHz频段中小数点后一位是偶数的频率和112.0~117.9 MHz频段中的所有频率。
- VOR台站发射机发送的信号有两个:一个是相位固定的基准信号;另一个是相位变化的信号,同时像灯塔的旋转探照灯一样向360°的每一个角度发射,而向各个角度发射的信号的相位都是不同的,它们与基准信号的相位差自然就互不相同。根据处在VOR台不同方位线上的航空器机载接收机接收的基准相位和可变相位的差来确定航空器方位。
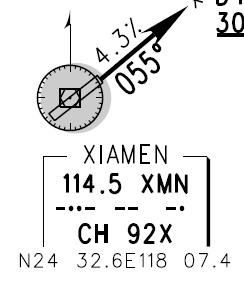
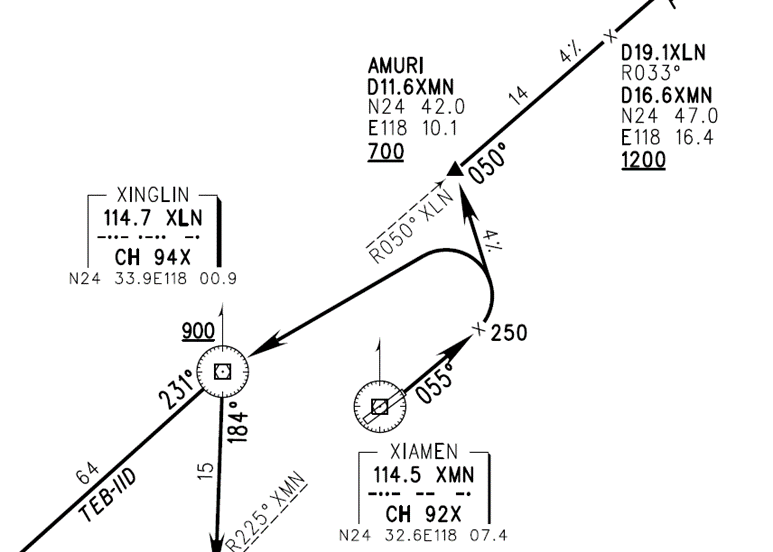
- VOR台通常安装在航路或终端区内主要用来实现航迹引导和定位的功能。VOR台的实图及在离场图中的符号和识别信息如下图所示。识别信息框中的信息含义为:
XIAMEN是VOR台的名称、114.5 MHz是该台的频率、XMN是该VOR台的识别标志(在我国VOR台的识别标志一般用3个字母表示),·--· -- -·为该导航台的莫尔斯电码。莫尔斯电码与导航识别标志的字母一一对应,飞行员通过收听莫尔斯电码确认所接收的导航设施是否正确,下图附上字母与莫尔斯电码的对应关系表。N24 32.6 E 118 07.4为该台的经纬度坐标。
厦门VOR台实物图

厦门VOR台在航图上的样式
-
无方向性信标台:无方向性信标台(Non-Directional Beacon,NDB)是现今仍在使用中的最古老的电子导航设备,信号发射的频率范围为200~500kHz。与NDB台站配合使用的机载接收机叫做自动定向仪(Automatic Direction Finder,ADF)。
- NDB台站向各个方向发射的信号都是一样的。当ADF接收到NDB的信号时,ADF的指针就指向NDB台站所在的方向,从而给出航空器和NDB台的相对位置关系。
- NDB台通常安装在航路或终端区内,主要用来实现航迹引导和定位的功能。
- NDB台按照所处的位置和所起的作用不同分为机场近距NDB台(近台)、机场远距NDB台(远台)、航路NDB台。机场近距NDB台通常设于跑道中线延长线上,距跑道着陆端900~1200m,机场远距NDB台通常设于跑道中线延长线上,距跑道着陆端6500~11100 m,航路NDB台一般设置在航路(线)上,通常设置在航路转弯点或机场进出点处。
- NDB台的实图及在离场图中的符号和识别信息如下图,下图所示识别信息框中的信息含义为:
HEXI是NDB台的识别名称,319 kHz是该台的频率,SB是该NDB台的识别标志(在我国NDB台的识别标志一般用2个字母表示),N27 44.3 E102 10.0为该台的经纬度坐标。
-
测距仪:测距仪DME是一种测距设备,工作在UHF频段。
- 其工作原理是:机载DME发射信号给地面台站上的DME,并接收地面DME应答回来的信号,测量发射信号与应答信号的时间差,取时间差的一半,就可计算出航空器与地面台站的直线距离,这一距离指的是航空器与地面台站的斜线距离。
- DME一般与VOR台和仪表着陆系统ILS配合使用。
- 当DME与VOR台配合使用时,它们共同组成距离-方位极坐标定位系统,直接为航空器定位;
- 当DME与ILS配合使用时,DME可以代替指点信标提供航空器进近和着陆的距离信息。DME与ILS台联合工作时,通常设置在下滑信标台,也可设置在航向信标台。
- 通常情况下,DME与VOR台联合工作的DME台信号覆盖区至少应与VOR台的覆盖区相等;与ILS联合工作的DME台的信号覆盖区至少应与仪表着陆系统方位引导扇区的信号覆盖区相等。在测距仪覆盖区内,应答机对航空器的处理容量至少应为100架航空器。
-
VOR/DME合装台:上文我们提到,VOR可以和DME联合工作,二者结合工作时所组成的设备被称为VOR/DME合装台。他们的优点是:当飞行员将导航设备调至VOR台频率时,可在获知导航台位置的情况下同时获知当前位置与导航台之间的距离,这对于单独的VOR、NDB、DME台来说有了极大的提升。
-
在离场图中的符号及识别信息如下图所示。所示识别信息框中的信息分为两部分,一部分是有关VOR的信息,其含义与VOR识别框中的相同;另一部分是有关DME的信息,其中
CH 116X表示DME的波道信息。DME台的波道与VOR台频率的调谐关系见下表。
| DME波道 | VOR/ILS频率 | DME波道 | VOR/ILS频率 |
|---|---|---|---|
| 17X | 108.0 | 77X | 113.0 |
| 18X | 108.1 | 78X | 113.1 |
| 19X | 108.2 | 79X | 113.2 |
| 20X | 108.3 | 80X | 113.3 |
| 21X | 108.4 | 81X | 113.4 |
| 22X | 108.5 | 82X | 113.5 |
| 23X | 108.6 | 83X | 113.6 |
| 24X | 108.7 | 84X | 113.7 |
| 25X | 108.8 | 85X | 113.8 |
| 26X | 108.9 | 86X | 113.9 |
| 27X | 109.0 | 87X | 114.0 |
| 28X | 109.1 | 88X | 114.1 |
| 29X | 109.2 | 89X | 114.2 |
| 30X | 109.3 | 90X | 114.3 |
| 31X | 109.4 | 91X | 114.4 |
| 32X | 109.5 | 92X | 114.5 |
| 33X | 109.6 | 93X | 114.6 |
| 34X | 109.7 | 94X | 114.7 |
| 35X | 109.8 | 95X | 114.8 |
| 36X | 110.0 | 96X | 114.9 |
| 37X | 110.1 | 97X | 115.0 |
| 38X | 110.2 | 98X | 115.1 |
| 39X | 110.3 | 99X | 115.2 |
| 40X | 110.4 | 100X | 115.3 |
| 41X | 110.5 | 101X | 115.4 |
| 42X | 110.5 | 102X | 115.5 |
| 43X | 110.6 | 103X | 115.6 |
| 44X | 110.7 | 104X | 115.7 |
| 45X | 110.8 | 105X | 115.8 |
| 46X | 110.9 | 106X | 115.9 |
| 47X | 111.0 | 107X | 116.0 |
| 48X | 111.1 | 108X | 116.1 |
| 49X | 111.2 | 109X | 116.2 |
| 50X | 111.3 | 110X | 116.3 |
| 51X | 111.4 | 111X | 116.4 |
| 52X | 111.5 | 112X | 116.5 |
| 53X | 111.6 | 113X | 116.6 |
| 54X | 111.7 | 114X | 116.7 |
| 55X | 111.8 | 115X | 116.8 |
| 56X | 111.9 | 116X | 116.9 |
| 57X | 112.0 | 117X | 117.0 |
| 58X | 112.1 | 118X | 117.1 |
| 59X | 112.2 | 119X | 117.2 |
| 70X | 112.3 | 120X | 117.3 |
| 71X | 112.4 | 121X | 117.4 |
| 72X | 112.5 | 122X | 117.5 |
| 73X | 112.6 | 123X | 117.6 |
| 74X | 112.7 | 124X | 117.7 |
| 75X | 112.8 | 125X | 117.8 |
| 76X | 112.9 | 126X | 117.9 |
-
定位点:定位点是指利用一个或一个以上的导航设备来确定航空器位置的地理位置点,离场航线上设置的定位点,可为飞行员提供一种确定飞行进程的方法。
- 离场图中出现的定位点有以下几种类型:位置报告点、转弯点(里程分段点)、双台交叉定位和区域导航航路点。
- 位置报告点分为强制性位置报告点和要求位置报告点,强制性位置报告点以实心的三角形表示,要求位置报告点以空心的三角形表示。
- 位置报告点符号边上会标注位置报告点的名称,一般用五个字母组成的五字代码表示,右图中ALDAP为强制性位置报告点;转弯点(里程分段点)用“×”表示,一般位于转弯的位置或有高度限制的位置。
- 双叉交叉定位就是飞行中通过测定的两条无线电位置线相交来确定航空器位置。交叉定位常用的定位方式包括:VOR/VOR、NDB/NDB、VOR/DME、NDB/DME,应尽可能使用相同的导航系统来确定,如VOR/VOR定位、NDB/NDB定位。只有在没有这种可能时,才使用混合定位,如利用NDB台的方位线与VOR径向线交叉定位。
- 双台交叉定位点符号旁会标注相应的定位方式,定位信息中用“R径向线角度VOR识别标志”表示定位时利用了VOR的一条径向线,用“D+DME距离数”表示定位时利用了一条距DME台某一DME距离的DME弧。如图,EKIMU是由CHONGGU VOR/DME台‘CGT’的339°径向线和距其DME距离为9.6NM的一条DME弧确定的,用“NDB识别标志+方位线角度”表示定位时利用了NDB的一条方位线。如下图的EKIMU在NANXIANG NDB台“PK”的115°方位。
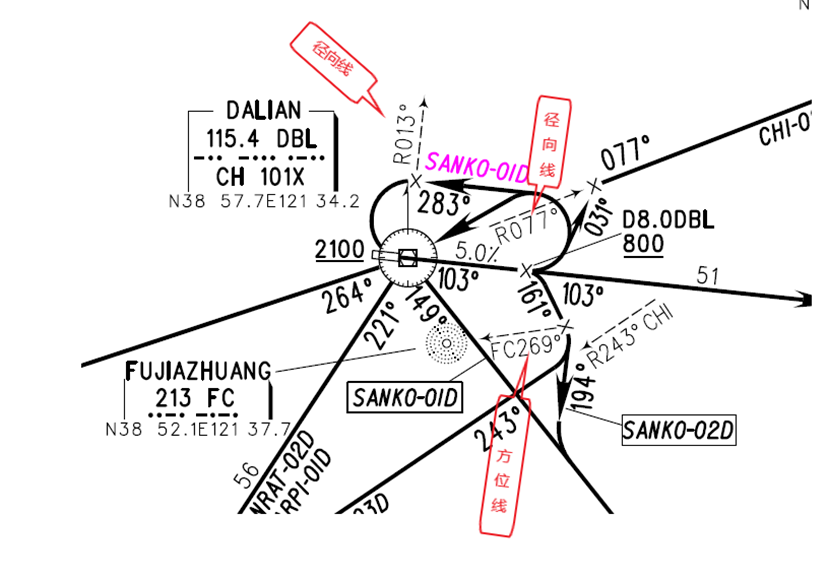
- 有一些定位信息是通过定位线给出的,定位线用带箭头的虚线表示,如图4-13所示的“R077°”表示DALIAN VOR/DME台‘DBL’的一条077°径向线,用来确定转弯位置;“FC269°”表示FUJIAZHUANG NDB台‘FC’的269°方位线,用来确定提前转弯点。VOR的径向线都是背向VOR台,箭头指向定位点,而NDB台的方位线恰恰相反,箭头指向NDB台。
- 双台交叉定位点符号旁会标注相应的定位方式,定位信息中用“R径向线角度VOR识别标志”表示定位时利用了VOR的一条径向线,用“D+DME距离数”表示定位时利用了一条距DME台某一DME距离的DME弧。如图,EKIMU是由CHONGGU VOR/DME台‘CGT’的339°径向线和距其DME距离为9.6NM的一条DME弧确定的,用“NDB识别标志+方位线角度”表示定位时利用了NDB的一条方位线。如下图的EKIMU在NANXIANG NDB台“PK”的115°方位。
-
飞越导航台定位:飞行员可以根据仪表的显示判断航空器是否过台,从而确定航空器的位置。当航空器在正上方飞越VOR台站时,水平状态指示仪(Horizontal Situation Indicator,HIS)的Flag指示由“To”变为“Off”,飞越台站后Flag变为“From”;当向台飞行的航空器飞越NDB台时,ADF的指针会在极短的时间内翻转180°。
-
飞行航迹:对每条离场程序而言,飞行航迹的描述是平面图中最为关键的信息,是飞行员实施离场程序的依据。这部分我们将从离场航线信息、航迹引导、爬升梯度、限制性空域入手进行介绍。
- 离场航线信息:离场航线用带有箭头的实线表示,如右图所示。有关航线的信息还包括:航线角、里程、高度、机型限制等信息。一般在离场航线段的起始位置会注明磁航线角,在航线段附近会标注该航段以千米为单位的里程信息,在某些航段或航线中的定位点对航空器的飞行高度有限制,会注明以米和英尺为单位的高度要求。如果离场程序中某些航段对航空器的类型有所限制,则会注明可以使用的航空器类型。
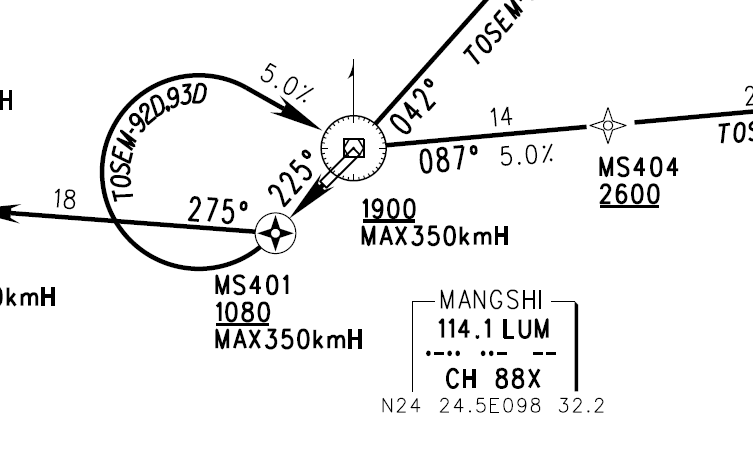
- 有些离场程序中包含盘旋爬升航线,在盘旋爬升航线附近会标注出航边飞行时间和两次过台的高度要求。
- 在离场图中,会用文字描述盘旋上升离场过程,盘旋离场程序在图中以文字注释的形式描述(如下图所示)。
- 离场航线信息:离场航线用带有箭头的实线表示,如右图所示。有关航线的信息还包括:航线角、里程、高度、机型限制等信息。一般在离场航线段的起始位置会注明磁航线角,在航线段附近会标注该航段以千米为单位的里程信息,在某些航段或航线中的定位点对航空器的飞行高度有限制,会注明以米和英尺为单位的高度要求。如果离场程序中某些航段对航空器的类型有所限制,则会注明可以使用的航空器类型。

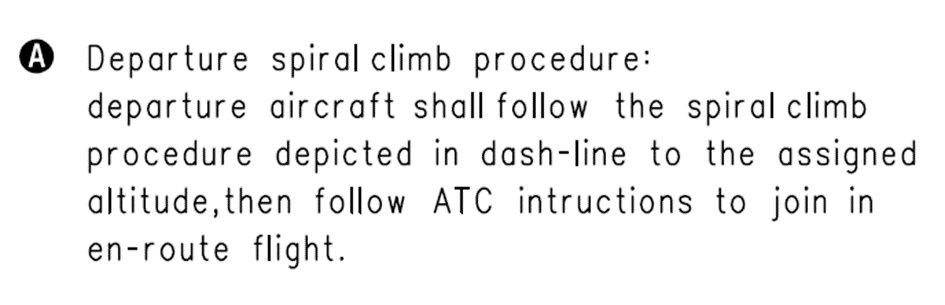
翻译:盘旋上升离场程序:离场航空器应跟随盘旋上升程序(虚线表示)上升至指定高度后,按ATC指令加入航线。
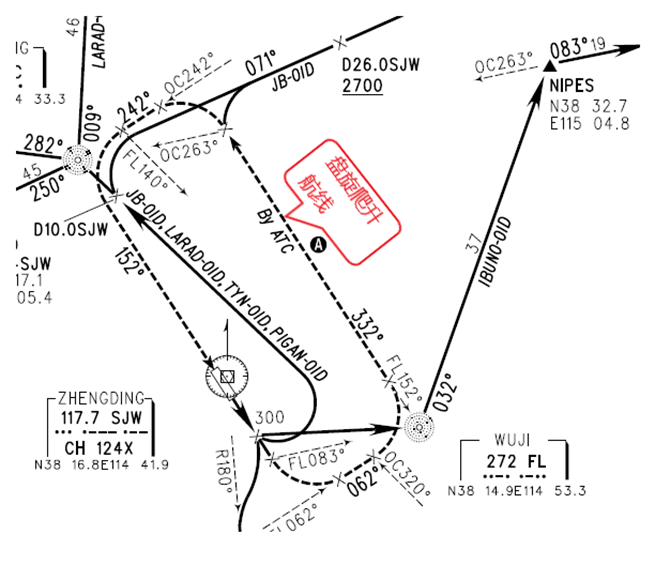
- 离场航线基本形式:离场航线有直线离场和转弯离场两种基本形式。各个机场根据具体的净空条件、导航台布局和空域布局采用合适的离场方式。
- 直线离场:直线离场要求起始离场航迹与跑道中线方向相差15°以内。当起始离场航迹不经过跑道起飞末端时,在正切跑道起飞末端处的横向距离不得超过300 m,并且航空器高度达到跑道之上120 m之前,不允许改变航迹的方向。但只要实际可行,离场航迹应与跑道中线延长线一致,各种直线离场的方式如图4-17所示。离场航线要求大于15°的转弯时采用转弯离场,但航空器高度达到跑道之上120m之前,不允许转弯。
- 如下图,离场航线AND-3D的离场方式为直线离场。转弯离场有指定高度转弯和指定点转弯两种方式,指定点转弯指航空器到达某一个点即可转弯。图中离场航线PIKAS-1D为指定点转弯,即要求航空器在到达点D4.1SHA(距SHA的DME距离4.1NM)时可右转弯。
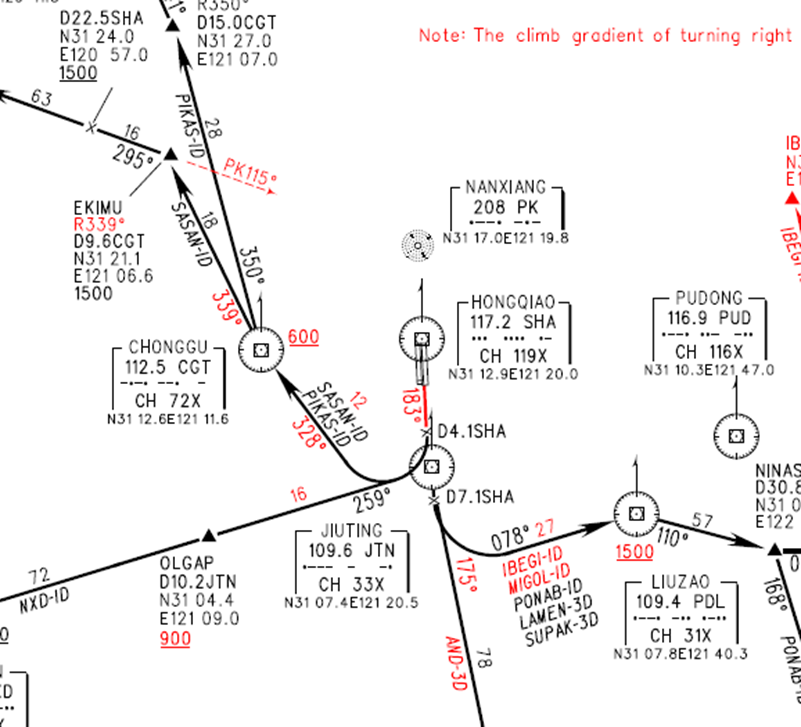
- 转弯离场:指定高度转弯指航空器的高度达到某一个值即可转弯。如图,离场航线TEB-11D为指定高度转弯,即要求航空器的高度到达250 m时可实施左转弯。
-
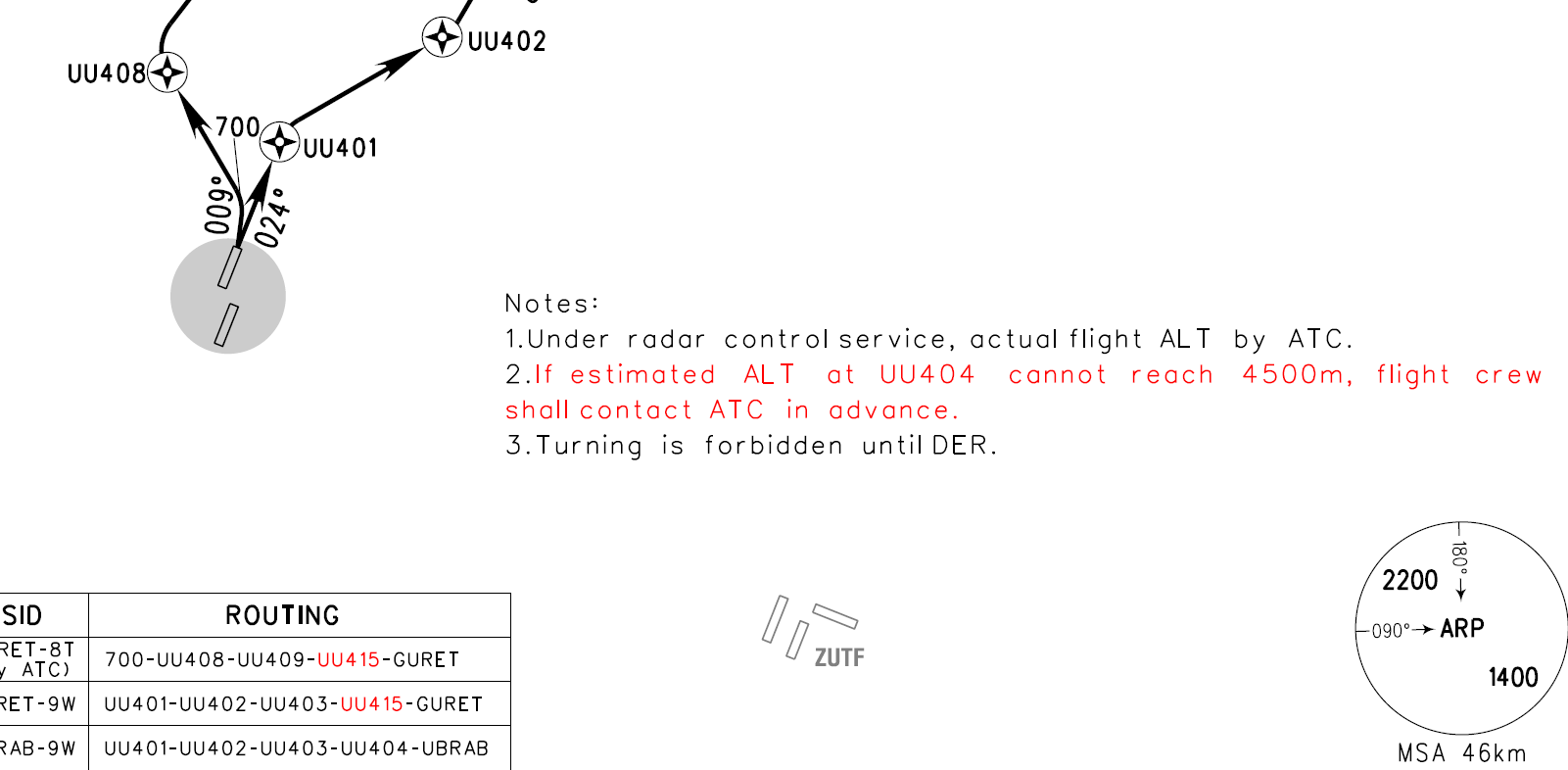
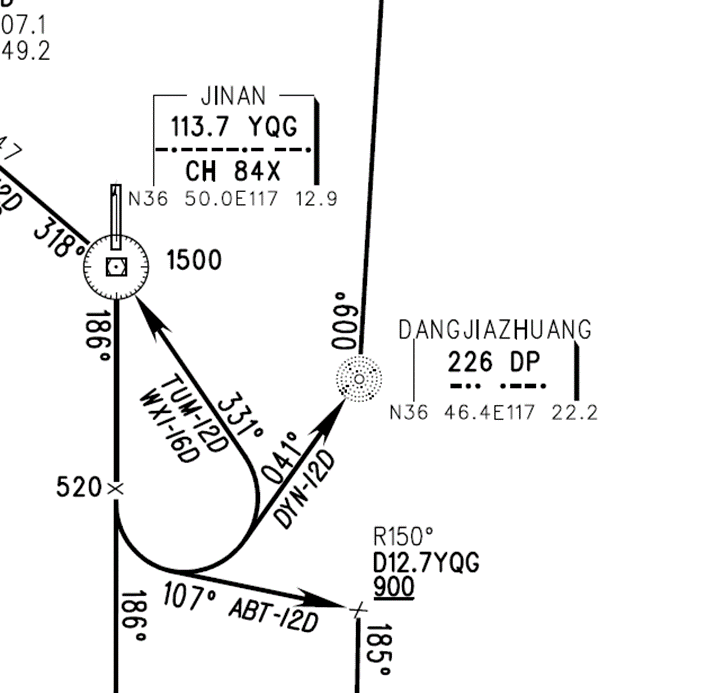
航迹引导:传统的无线电导航航路的航迹引导由无线电导航设施提供,在直线离场中要求航空器在20 km内取得航迹引导,而在转弯离场中要求航空器在转弯之后10 km内取得航迹引导。在离场程序中,航迹引导主要是由VOR的径向线或NDB的方位线来提供。在离场图中靠近导航台符号的位置会标注VOR的径向线信息或NDB的方位信息。如右图所示,TUM-12D离场航线过JINAN VOR台‘YQG’后由VOR台‘YQG’的318°径向线提供航迹引导。而DYN-21D离场航线过DANGJIAZHUANG NDB台后由DANGJIAZHUANG NDB台的方位线提供航迹引导,航空器飞行过程中应保持009°的电台磁方位飞行。
-
爬升梯度:在航空器离场过程中,要求航空器相对于障碍物保持一定的超障余度。除非另有说明,否则离场爬升的最小爬升梯度为3.3%。如果3.3%的爬升梯度不能满足离场程序设计中对超障余度的要求,则在离场图的平面图部分会注明特定的爬升梯度。如图所示,起始爬升的爬升梯度要求大于等于4%,在达到SID程序所要求的高度之前必须保持这个爬升梯度。
-
限制性空域:如果离场图的制图范围内有限制性空域,包括禁区、限制区、危险区,则图中会标绘出所有这些限制性空域的范围、代码及其有活动的时间。
- 每个限制性空域都有一个代码,包括三部分内容:
- 第一部分为区域代码,表示限制性空域所属的情报区,用情报区四字地名代码的前两位表示;
- 第二部分表示限制性空域的类型,其中“P”代表禁区,“R”代表限制区,“D”代表危险区;
- 第三部分表示限制性空域的编号。
- 限制性空域的符号及描述如图所示。由图可知,
ZL(R)326代表兰州情报区的第326号限制区。
- 每个限制性空域都有一个代码,包括三部分内容:
-
高度表拨正程序:航空器在不同的飞行阶段,需要飞行员拨正高度表基准值,采用不同的基准面测量高度,这是由气压式高度表的测量原理决定的,即高度表是将测量的气压值与设定的基准面气压值的差值换算为航空器所在位置相对于设定的基准面的高度差值。高度表设定的基准面气压值一般有机场场面气压(QFE)、修正海平面气压(QNH)和标准大气压(QNE),在不同的情况下和不同的飞行阶段航空器将采用不同的基准面气压值。
为便于管制员和飞行员明确不同高度基准面的有效使用区域,并正确执行高度表拨正程序,高度表拨正值的适用范围在水平方向上用QNH适用区域的侧向界限作为水平边界,在垂直方向上用过渡高度和过渡高度层作为垂直分界。因此在离场图中会公布过渡高度层(TL, Transition Level)、过渡高度(TA, Transition Altitude)或过渡高(TH, Transition Height)以及使用机场修正面气压区域水平边界(如下图所示)。

对于中国大陆空域的大部分机场而言,TL和TA有一个具体的值,下面将详细介绍机场TL、TA的建立规定和高度表拨正程序。
-
建立机场过渡高度和过渡高度层的原则
- 过渡高度层高于过渡高度,且二者垂直距离至少为300 m,但不应大于600m。
- 公布的过渡高度层一般不随气压的变化而调整,当气压变化到一定程度时,为了确保在气压变化很大的情况下,过渡夹层有安全合理的垂直空间,相应地调整过渡高度。具体调整方法如下: - 当机场修正海压小于979 hPa(含)时,过渡高度应降低300m;
- 当机场修正海压大于1031 hPa(含)时,过渡高度应提高300m。
- 过渡高度不得低于仪表进近程序的起始进近高度。
- 终端区的上限高度应尽可能与过渡高度一致,以便于管制调配。
- 两个或两个以上机场之间距离较近、需要建立协调程序时,应建立共同的过渡高度和过渡高度层,这个共用的过渡高度和过渡高度层必须是这些机场规划的过渡高度和过渡高度层中最高的。
-
建立机场过渡高度和过渡高度层的规定
| 机场标高 | 过渡高度 | 过渡高度层 |
|---|---|---|
| 1200(含)以下 | 3000 | 3600 |
| 1200-2400(含) | 4200 | 4800 |
| 2400以上 | 视情况确定 | 视情况确定 |
然而,对于不同的机场,它们所使用的气压基准面也有所不同。以下我们将不同的基准面进行介绍。
-
机场场面气压(QFE):机场场面气压(QFE)简称场压,(下称QFE)是指航空器着陆区域最高点的气压。场面气压高简称场压高,当高度表气压基准拨正场面气压值时,高度表的示数即为场面气压高。采用场面气压高可以方便判断航空器距跑道的垂直距离。但在航图上地形和障碍物的最高点用标高表示,标高是距离平均海平面的垂直距离,因此飞行员不能直观得出航空器距地形及障碍物的垂直距离。因为高原机场的场压很低,多数航空器的高度表气压刻度窗无法调到那么低的气压值,所以高原机场飞行无法使用QFE。终端区内不同机场的场压不同,造成同一终端区内航空器的高度表基准不同,因而使得管制员无法判断航空器之间的垂直间隔,因此QFE不适用终端区内,同理不适用于航线运行。因此场压高只适用于进近、起飞和着陆阶段。
-
修正海平面气压(QNH):修正海平面气压(QNH)是指将观测到的场面气压,按照标准大气条件修正到平均海平面的气压,即QNH=QFE+机场标高/气压递减率。当高度表气压基准拨正至QNH值时,高度表示数为海压高度。采用QNH能方便地判断航空器距离障碍物的垂直距离,因为航空器与地面障碍物使用相同的基准面,即平均海平面。QNH拨正值的使用不受高原机场的限制,并且因终端区内大气条件近似相等,终端区内由不同机场的QFE修正得到的QNH近似相等,因此QNH可以适用于终端区内。但因航线飞行距离远大于终端区,根据相距较远的不同机场的QFE修正得到的QNH值相差很大,无法满足同一管制区内使用统一基准面的要求,因此QNH不适用于航线运行。
统筹考虑QNH和QFE的优缺点,我国民用机场在2001年8月至2002年8月分三批完成了高度表拨正程序改革方案,不再使用QFE,在终端区使用QNH。但目前我国部分军民合用机场依然在使用QFE。
- 标准大气压(QNE):标准大气压(QNE)是指标准大气条件下海平面的气压,其值为1013.2hPa(760mmHg)。当高度表气压基准拨正至QNE值时,高度表示数为标准气压高度。采用QNE作为高度表拨正值,可以满足同一管制区使用统一基准面的要求,因此适用于航线飞行阶段。
为方便大家更好的理解QFE、QNH和QNE的区别,下图为大家详细的解释了不同气压基准面的区别:

综上,我们总结了在不同飞行阶段,高度表修正程序的使用:
| 飞行阶段 | 高度表修正程序的使用 |
|---|---|
| 离场航空器 | 起飞前,管制员发给航空器滑行许可中必须包括QNH高度表拨正值。航空器在过渡高度以下飞行,其垂直位置用高度表示。在爬升过程中航空器保持本场/终端区QNH(具体由管制员确定),直至到达过渡高度。在穿越过渡高度时,航空器立即将高度表的气压刻度调整到QNE,其后航空器的垂直位置用飞行高度层表示。离场航空器在过渡高度以下穿越QNH高度表拨正水平边界时,必须将高度表气压刻度调到QNE,其后航空器的垂直位置用飞行高度层表示。 |
| 航路、航线飞行 | 在未建立过渡高度和过渡高度层的区域和航路、航线飞行阶段,使用标准大气压的高度表拨正,按照规定的飞行高度层飞行。 |
| 进场航空器 | 在进近许可和进入起落航线许可中应包括QNH拨正值,航空器在过渡高度层或以上飞行,其垂直位置用飞行高度层表示。进场航空器在下降穿过机场的过渡高度层,或者航空器在过渡高度以下进入QNH高度表拨正水平边界时,应立即将高度表气压刻度调到本场/终端区的QNH值,其后航空器的垂直位置用高度表示。 |
| 飞越机场的航空器 | 在过渡高度层或者以上飞越机场的航空器,高度表拨正值使用QNE;在过渡高度以下飞越机场的航空器,在QNH高度表拨正水平边界内飞行时,其高度表拨正值使用QNH。当航路或航线的飞行高度层恰在过渡夹层,又需要通过QNH高度表拨正区域的水平边界时,航空器应按照管制员的指令改飞其他飞行高度层。因为为了保证飞行安全,过渡夹层不得用于平飞。 |
- 最低扇区高度:离场图中会标注最低扇区高度(Minimum Sector Altiutude,MSA,下称MSA)。它是紧急情况下需偏离标准进离场航线时,在规定扇区内可以使用的最低高度。最低扇区高度是以归航台为中心,46km(25NM)为半径所确定的区域(包括5 NM的缓冲区)内,它通常按照地形和障碍物情况,将整个区域划分成几个扇区,每个扇区的最低安全高度等于扇区内最高障碍物标高加上至少300 m的超障余度,然后以50m向上取整。在山区,最低超障余度应予以增加,增加的数值最大可达300m,即山区的最低超障余度应为300~600m。
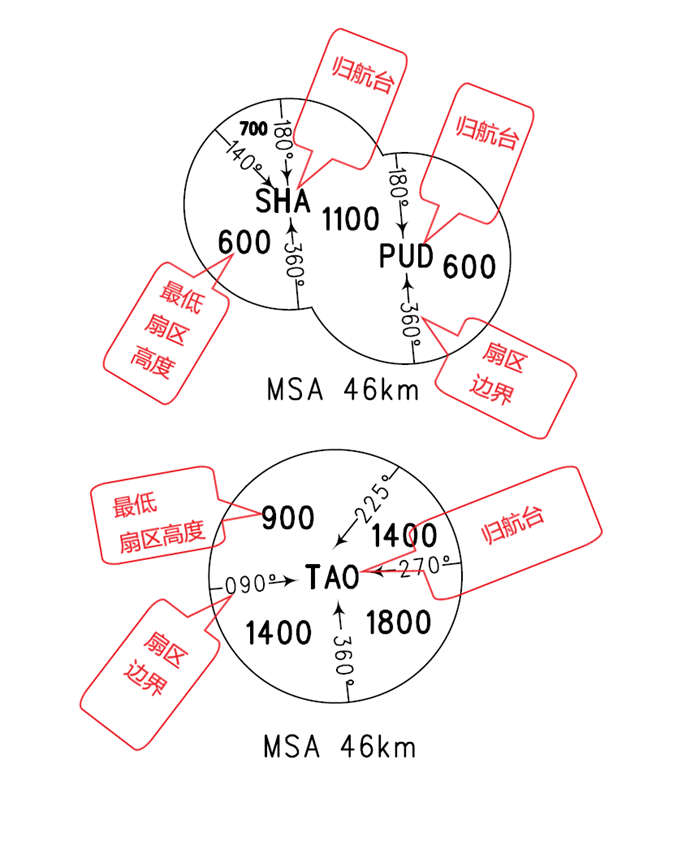
- 离场图中最低扇区高度标注方式如图所示,图中会标注归航台、扇区划分边界及每个扇区的最低安全高度。若存在两个重要的归航台,可依据这两个台分别划设扇区并计算最低扇区高度,并使用两个46 km圈的并集形式体现MSA。
- 在这张图中,青岛机场的归航台为QINGDAO VOR台‘TAO’,分为四个扇区,其中:
- 向台磁航向90°至向台磁航向225°之间的最低扇区高度为900米;
- 向台磁航向225°至向台磁航向270°之间的最低扇区高度为1400m;
- 向台磁航向270°至向台磁航向360°之间的最低扇区高度为1800米;
- 向台磁航向360°至向台磁航向090°之间的最低扇区高度为900米
航图判读
以上这些都是一张机场图中所涉及到的概念名词的解释,接下来我们将系统的介绍传统离场图和PBN离场图的判读。
- 传统离场图
本例中,我们将以ZSNB-7A这张图为例,分块讲解离场图。
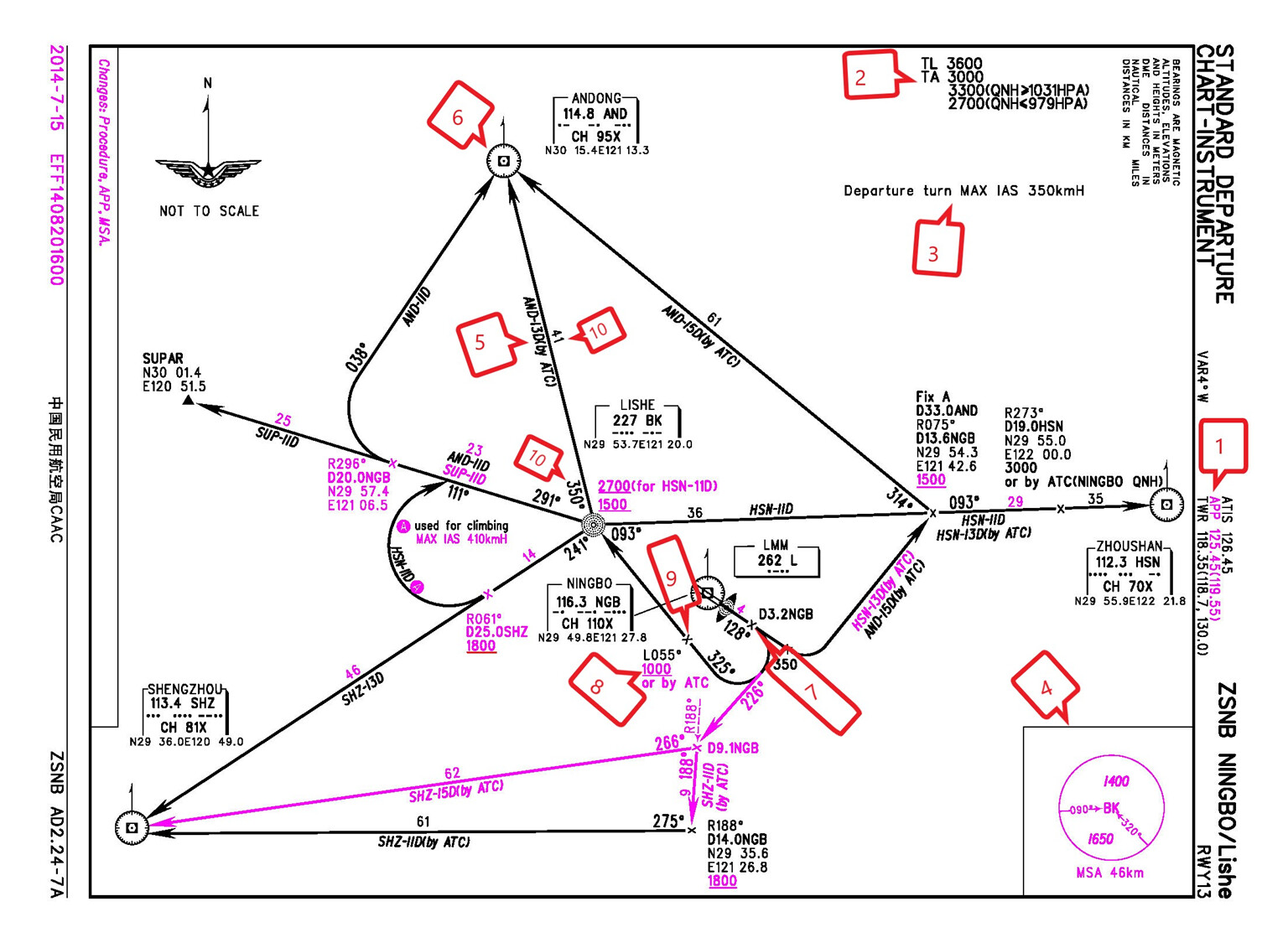
飞行员在离场准备时,首先掌握离场图中的关键信息。如上图所示的宁波/栎社机场13号跑道的传统离场程序图,假设选择使用AND-13D离场,图中的标注为执行该离场程序的关键信息。
| 标注 | 释义 |
|---|---|
| 1 | 离场过程中会使用到的通信频率。机场通播的频率为126.45 MHz,塔台的主用频率为118.35 MHz,备用频率118.7 MHz和130.0 MHz,进近的主用频率为125.45 MHz,备用频率119.55 MHz。 |
| 2 | 过渡高度和过渡高度层。当QNH≤1031 hPa,过渡高度为2700m;当QNH≥1031hPa,过渡高度为3300m;当979hPa<QNH<1031hPa,过渡高度为3000m,过渡高度层为3600m。 |
| 3 | 使用该离场图的注意事项。离场转弯的最大指示空速为350km/h。 |
| 4 | 最低扇区高度。扇区划分以LISHE NDB台/BK/227kHz为中心,以90°方位线和320°方位线分成两个扇区,其中一个扇区的最低安全高度为1 400 m,另一个扇区的最低安全高度为1 650 m。 |
| 5 | 程序名称,程序名为AND-13D。by ATC指该程序的使用必须获得ATC的许可。 |
| 6 | 离场程序的终止点。离场程序AND-13D的终止点为ANDONG VOR/DME台,识别标志为AND,频率为114.8 MHz,DME波道为95X。 |
| 7 | 转弯点。由距NGB台的DME距离3.2 NM的DME弧确定。 |
| 8 | 高度限制。过点高度要求1000 m(含)以上或ATC指定的高度。 |
| 9 | 定位信息。该定位点由双NDB台定位。与中指点标合装在一起的NDB台“L”/262kHz的55°方位线和栎社NDB台‘BK’/227kHz的325°方位线相交确定。 |
| 10 | 离场航线信息。由栎社NDB台至庵东VOR台的航线角为350°,航段里程为41km。 |
我们假设航空器沿离场程序AND-13D离场,该离场程序的实施方法为:
-
在VOR导航控制盒上调谐NINGBO VOR台‘NGB’的频率
116.3MHz,把ADF接收机调到LISHE NDB台‘BK’的频率227kHz,另一个ADF接收机调到NDB台‘L’的频率262kHz; -
航空器从13号跑道起飞后保持跑道磁向128°飞行,当DME的示数显示3.2时,右转使NDB台‘BK’的ADF接收机的指针指向325°向NDB台‘BK’飞行,且当NDB台‘L’的ADF接收机的指针指向55°时,航空器此时的最低高度为1000 m或ATC指定的高度;
-
航空器过NDB台‘BK’后,NDB台‘BK’的ADF接收机的指针指向170°,航空器背台飞行,在VOR导航控制盒上调谐ANDONG VOR台‘AND’的频率为
114.8 MHz,在NDB台‘BK’和ANDONG VOR台‘AND’的中间位置,改为由ANDONG VOR台‘AND’提供航迹引导,航空器沿着ANDONG VOR台‘AND’的170°径向线飞至ANDONG VOR台。 -
在离场过程中,如果航空器的高度达到3000 m(假设979hPa<QNH<1031hPa),飞行员将其中一块高度表气压值拨正为标准大气压1013hPa,另一块保持QNH值,当航空器的高度到达3600m时,两块高度表气压值均拨正为标准大气压1013hPa。
-
PBN离场图
在介绍RNAV离场图的判读之前,我们先来介绍一下基于性能导航(PBN)和区域导航点的相关概念。- 基于性能导航
-
基于性能导航(Performance-based Navigation,PBN)的导航方式是国际民用航空组织(ICAO)在整合各国区域导航(Area Navigation,RNAV)和所需导航性能(Required Navigation Performance,RNP)运行实践和技术标准的基础上,提出的一种新型运行概念。它将航空器先进的机载设备与卫星导航及其他先进技术结合起来,涵盖了从航路、终端区到进近着陆的所有飞行阶段,提供了更加精确、安全的飞行方法和更加高效的空中交通管理模式。
-
PBN的引入体现了航行方式从基于传感器导航到基于性能导航的转变。同时,PBN作为一种导航方式,规定了区域导航系统内航空器沿ATS航路、仪表进近程序和空域飞行时的性能要求,通过空域运行所需的精度、完整性、连续性、可用性和功能性来确定性能要求。
-
在传统程序设计中,航空器导航是基于地面无线电导航设施的信号进行向背台飞行。这种导航方式的最大缺点就是飞行路线受地面导航源位置的限制,常常导致飞行路线增长。如果要优化飞行程序,又会受到地基无线电导航设备安装位置和成本限制,并且保护区相对较大,导航系统误差会随着航空器距离导航设施的增大而增大。
-
PBN技术是一种基于性能的运行,对使用程序或航路的航空器的导航能力进行严格、明确的规定,确保了飞行轨迹的持续性、可靠性和预测性,减小超障评估区域。对于设计者来说最大的变化是设计时不用依赖导航源,而只考虑导航标准。正确选择导航标准应根据空域情况、可用的导航设施类型、机载设备和航空器运行能力,同时还要考察航空器营运人、飞行员、空中交通服务提供各个方面的能力才能确定。当这些要求都满足时,不管是什么导航设施,都可以采用统一的设计准则来设计航路点和路线,只需要根据超障和间隔标准的不同而进行适当调整,大大简化了程序设计工作。传统导航方式和PBN导航方式的对比如4-23所示。
-
众所周知,导航系统总有一些偏差,因此,PBN技术的提出也提出了相应的导航规范。这个导航规范是指为了在某一指定空域内支持PBN运行而对航空器和飞行机组提出的一系列要求。
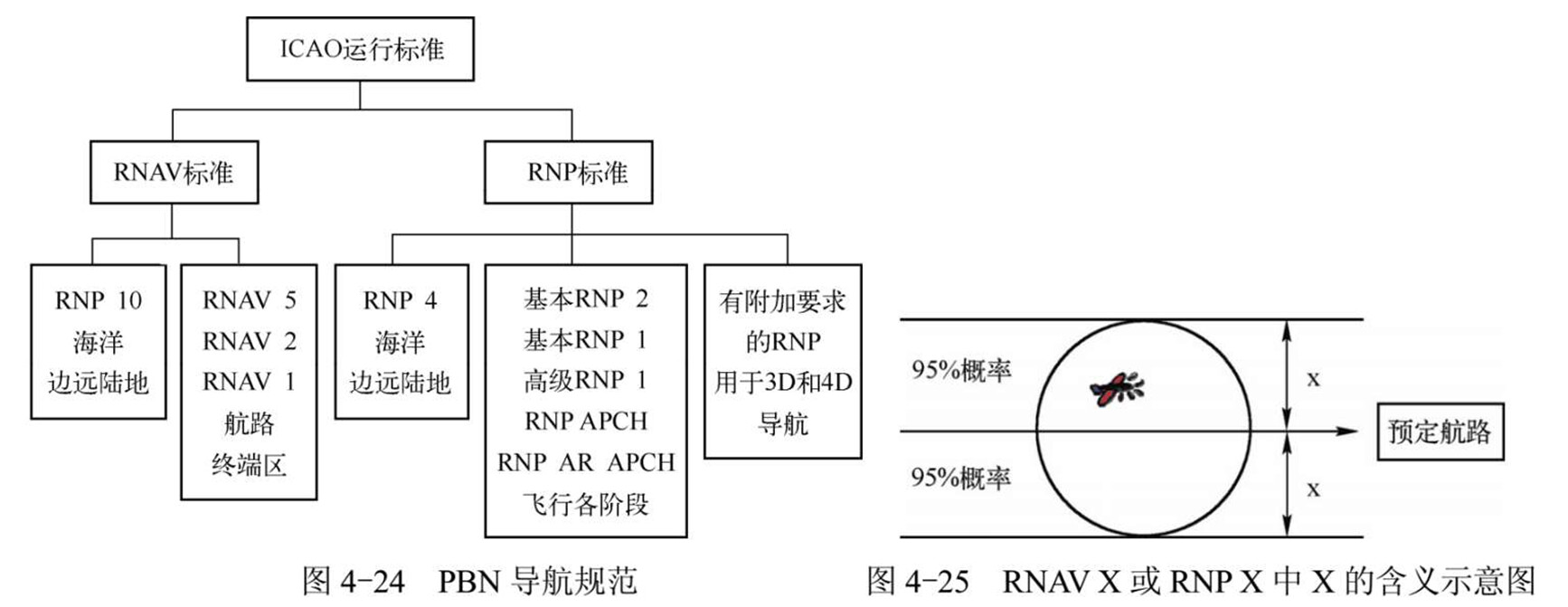
- PBN包含RNAV和RNP两种导航规范。公布时使用RNAV X和RNP X。无论对指定的RNP还是指定的RNAV而言,数字“X”都指预期在该空域、航路或程序范围内,所有运行的航空器至少在95%的飞行时间里都可以达到的横向精度为X海里,且这只表示精度的要求。同样精度的RNP和RNAV运行的主要差别在于RNP运行要求机载性能监视与告警的要求,而RNAV运行则需要运用ATS监视设施辅助来保证航空器的安全。机载性能监视和告警能使飞行机组人员自主发现RNP系统是否达到导航规范所要求的导航性能,它与侧向和纵向导航均相关。因此,RNP运行可以自行发现航空器位置和导航性能的误差,并通过告警告知飞行员,在缺乏监视设施的区域可以增加空域系统的安全性。
- 如果以上的内容较为难懂,可以图4-24和图4-25中的相关内容,它完美总结了以上关于PBN导航规范中的一些概念。
- 目前,导航规范中出现了非常多的导航规范。这里将常见的导航规范做成表格方便大家阅读。
-
- 基于性能导航

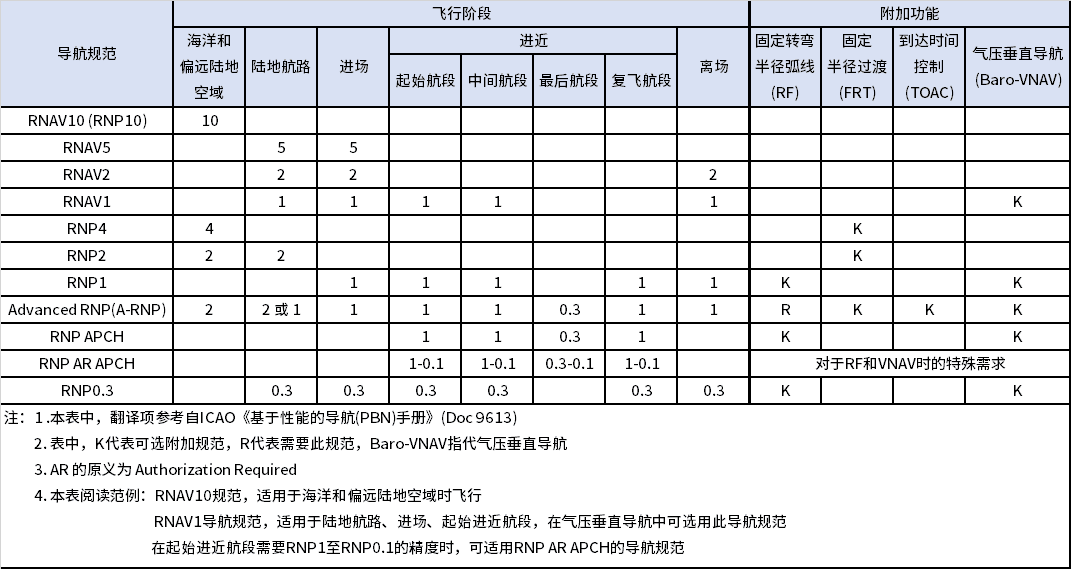
由上可知,不同阶段、不同程序的不同航段乃至同航段的不同阶段可使用不同的规范来设计。
- 区域导航点:区域导航航路点(Way-point)是用于确定一条区域导航航线或确定使用区域导航的航空器的飞行航径而规定的地理位置
- 区域导航点分为飞越航路点和旁切航路点,其在离场图中的符号如图4-11所示。
- 旁切航路点(Fly-by way-point)要求在到达该点之前转弯使航空器切入下一段航路或程序的航路点
- 飞越航路点(Flyover way-point)为加入下一段航路或程序而飞越该点后开始转弯的航路点,如图4-12所示。
- 区域导航点分为飞越航路点和旁切航路点,其在离场图中的符号如图4-11所示。

看完以上的概念,我们现在进入RNAV离场图判读的阶段。本章主要根据ZSNB-7C来讲解,希望大家在看完我们的解读后,找到其他机场的航图自己解读一遍。

飞行员在离场准备时,首先掌握离场图中的关键信息。如上图所示的宁波/栎社机场13号跑道的RNAV离场程序图,假设选择使用AND-63D离场,图中的标注为执行该离场程序的关键信息。
| 标注 | 释义 |
|---|---|
| 1 | 离场程序类型。表明该离场程序为RNAV离场。 |
| 2 | 离场程序导航规范和导航源。离场程序的导航规范为基本RNP 1,导航源为GNSS。 |
| 3 | 离场过程中会使用到的通信频率。其中机场通播的频率为126.45MHz,塔台的主用频率为118.35MHz,备用频率118.7MHz和130.0MHz,进近的主用频率为125.45MHz,备用频率119.55MHz。 |
| 4 | 过渡高度和过渡高度层。其中当QNH≤1031hPa,过渡高度为2700m;当QNH≥1031hPa,过渡高度为3300m;当979hPa<QNH<1031hPa,过渡高度为3000m,过渡高度层为3600m。 |
| 5 | 最低扇区高度。扇区划分以LISHE NDB台‘BK’/227kHz为中心,以90°方位线和320°方位线分成两个扇区,其中一个扇区的最低安全高度为1400m,另一个扇区的最低安全高度为1650m。 |
| 6 | 程序名称,程序名为AND-63X。其中by ATC是指该程序的使用必须获得ATC的许可。 |
| 7 | 转弯要求高度。离场起始初始转弯要求大于200米。 |
| 8 | 航路点,包括航路点符号、名称及过点高度要求。航路点的符号表示该航路点为旁切航路点,名称NB306,过点高度为1500 m,该高度为建议高度。 |
| 9 | 离场航线信息。由航路点NB307至ANDDONG VOR台的航线角为350°,航段里程为41km。 |
我们假设航空器沿离场程序AND-63D离场。该离场程序的实施方法为:
- 航空器从13号跑道起飞后保持跑道磁向128°飞行,当高度表的示数显示200m时右转飞行至航路点NB306,并要求航空器此时的高度为1500m,最大表速350KM/H;
- 然后沿308°航线角飞行7km至航路点NB109,此时要求航空器的高度为1800m;
- 再右转沿38°航线角飞行10 km至航路点NB307;
- 最后左转沿350°航线角飞行41km至ANDONG VOR台。
在PBN程序中,过点高度的要求有可能会使用下划线或上划线,或者不划线。如果在NB306的过点高度1500处加下划线,表示航空器在该点的最低高度为1500m;如果在NB306的过点高度1500处加上划线,表示航空器在该点的最高高度为1500m;如果在NB306的过点高度1500m处既加上划线又加下划线,表示过该点的强制高度为1500m;如果在NB306的过点高度1500m处什么线都没有,表示过该点的推荐高度为1500m。